Originariamente inviato da stardobas
Visualizza il messaggio
Una delle implementazione prevede che la lettura sia fatta da un altro atmega (non quello principale con i controlli di volo) e che poi i dati siano passati via i2c.
Non è proprio la fine del mondo, più che altro è una possibilità per chi vuole aggiungere il gps e ha già delle flight control con il solo atmega328.
Il vero cambiamento comunque è un altro, ed è il porting del codice sulle cpu arm stm32, dove la potenza di calcolo è molto più alta e le possibilità di sviluppo sono molto migliori.
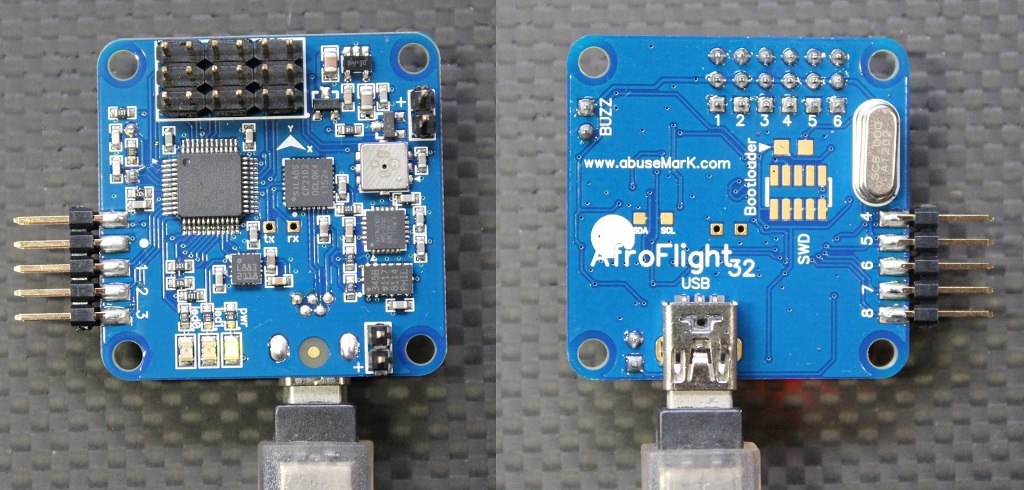
Il porting è già stato completato da Timecop (AfroFlight32 - afrodevices - STM32F103-based simple multirotor flight controller. - Multirotor software and hardware - Google Project Hosting) ed attualmente gira già sulle schede cinesi Freeflight che puoi comprare da goodluckbuy, saranno disponibili altre schede fatte specificamente (sempre da timecop) per multiwii e finalmente ci sarà un buon salto prestazionale, che associato all'introduzione di esc più risoluti, rende l'hardware di volo finalmente aggiornato e moderno.
FunFly Controller Naze 32 [AFRO_NAZE32] - ¥5,500 : abusemark web store
Da ora in poi si può ragionare seriamente (senza portarsi dietro tanti limiti stupidi dell'hardware vecchio) e sviluppare qualcosa che possa servire veramente a tutto (con funzionalità avanzate di position holding, rth, navigazione, ecc...) ma che mantenga i costi del progetto estremamente bassi e sia realmente competitivo (e probabilmente vincente) rispetto alle soluzioni commerciali o ad altri progetti nati vecchi.
Chiaramente tutto dipende dalla bontà del codice, e almeno in questa prima fase sci si dovrà abituare ad usare un ide nuovo con qualche differenza rispetto ad arduino, ma almeno l'hardware ora c'è.

")
Commenta