La bussola è correttamente configurata ? Ruotando il drone si vede in MP l'orientamento corretto ?
-
-
si....lo era e per scrupolo l'ho rifatta 10 min fa....
Quello che purtroppo dalla foto precedente non si vede (e che ora ti rimetto bene), è che ci sono settati e abilitati 2 compass, con offsets parecchio diversi tra loro.
Su MP la prua me la dà abbastanza corretta, ma sopratutto non è ballerina e si muove correttamente

Commenta
-
ho appena fatto una prova a motori accesi.
Stesso gas, spostando solo lo yaw tutto a dx e tutto a sx.
la variazione di velocità sui motori si sente ad orecchio, ma quello che non mi torna è che appena mollo lo stick, non varia il suo e resta come quando lo yaw era tutto da una parte.
Eppure da MP vedo lo stick tornare al centro.
Ho anche applicato i riflettenti ai motori per controllare i giri con un laser ma....non li legge
Commenta
-
Ho cercato un po' in giro e ho visto che questo problema si è già manifestato.
Qualcuno ha risolto resettando la FC, ricaricando il firmware e rifacendo tutte le configurazioni.
Qualcun altro ha aumentato il valore IMAX dei PID di yaw (il fatto che ricentrando lo stick i motori non ritornino al numero di giri iniziale potrebbe essere dovuto a questo)
Altri hanno risolto comprando un nuovo FC.
Prima di arrivare alla terza soluzione, proverei le altre due ...
Magari fai una stampata della pagina di Extended Setup, dove si vedono i PID.Commenta
-
usa solo quello esterno e vedi se indica correttamente il nord confrontando il planner con un bussola del cellulare (tarata)Commenta
-
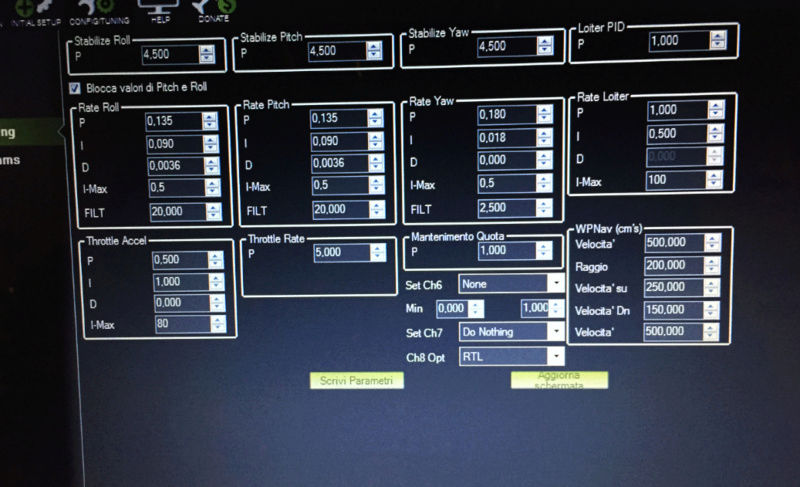
Ieri sera ho fatto una foto proprio ai PID
la posto oggi da casa che almeno si vede bene.
Comunque sul rate yaw ho IMax 0,5 come su tutti gli altri, mentre FILT è a 2,5 quando picth e roll sono a 20.
Ok per il compass.Commenta
-
Io ripartirei da capo.Originariamente inviato da Sinapsi Visualizza il messaggio
Resetta tutto, carica di nuovo il firmware e parti da zero. Cancella pure il modello sulla radio e riparti.
Verifica tutti i cavi (magari scambiandoli fra loro, in modo da escludere che il problema sia di connessioni fra i vari componenti) e come ti hanno consigliato disabilita la bussola interna, usa quella del GPS.
Rifai tutte le calibrazioni e vediamo. A terra, senza eliche, te ne accorgi già se i motori girano in maniera corretta muovendo gli stick (i motori varieranno di velocità in maniera opportuna per gestire i comandi) oppure se c'è qualche problema.Commenta
-
Se non si vuole perdere troppo tempo a capire cosa non funziona, potrebbe essere la strada migliore. Ci sono un sacco di parametri che si possono modificare magari inavvertitamente.Originariamente inviato da Invernomuto Visualizza il messaggio
Commenta
-
Allora...questa è la foto degli attuali PID (mai toccati):
Per cancellare tutto e ripartire da zero, problemi non ce ne sono.....
Però piacerebbe scoprire il perchè, si comporta così....
Per quanto riguarda il compass, ricordo bene (perchè l'ho rifatto pure ieri sera), che cliccando sul tasto sopra Pixhakw/PX4 nel SELECT DEVICE TO QUICK CONFIGURE PARAMETERS, di default ti mette in uso entrambi i compass (l'interno l'avevo deselezionato), inserendo gli offset dopo la calibrazione.
Commenta
-
Non mi metterei a toccare i PID.Originariamente inviato da Sinapsi Visualizza il messaggio
In stabilize non deve roteare su se stesso. Ripartire da zero, dimenticandoti quello che hai fatto prima e rimettendo in discussione tutto, aiuta a isolare il problema: magari hai saltato un passaggio, hai modificato qualche parametro involontariamente oppure c'è un componente difettoso che devi trovare prima di poter proseguire.
Parti con meno sensori possibili, il quad deve volare bene in stabilize, poi aggiungi GPS, bussola e barometro.
Ci abbiamo sbattuto il naso tutti le prime volte, è tutta esperienza che ti stai facendo per il prossimo progetto, in bocca al lupo!
Commenta
-
Per essere sicuro di resettare tutto quanto, carica un firmware diverso (Arduplane) e poi ricarica Arducopter. Il passaggio ad un firmware diverso provoca l'impostazione di tutti i parametri al default e quindi sei sicuro di partire con una situazione pulita.Commenta
-
Ok. Stasera se riesco, si riparte da zero !!!Commenta
-
Resettato tutto, caricato dapprima arduplane, poi nuovamente arducopter.
Rifatti tutti i settaggi, lasciando scollegato il GPS (e relativo compass), radio configurata e movimenti stick corretti, compass e magnetometro calibrati, esc calibrati, prova interferenze compass fatta.
Lo YAW fa ancora quel che vuole
Ho capito che il movimento di YAW per armare i motori (stick tutto a dx e in basso) è poi lo YAW al massimo che mi sono ritrovato ieri, alzandolo in volo, quando roteava come una trottola (verso dx appunto)
In pratica si comporta come se il comando non avesse il ritorno al centro.
Tiro a dx ed i motori girano per far ruotare il drone. E questa situazione la mantiene anche quando lo stick viene rilasciato.
Stessa cosa dal lato opposto: se do YAW a sx, prima passa ad un suono da 4 motori bene o male ai medesimi giri, poi senti distintamente aumentare 2 motori.
Ovviamente anche per lo YAW a sx vale la stessa regola: anche rilasciando lo stick, rimane dov'è e per tornare ad una situazione apparentemente normale devo dare YAW contrario.
Questa cosa mi sta tirando scemo
Commenta
-
UHM.......
però il mini log che ho creato, pare mi smentisca:

Ho acceso ed armato i motori...
Una volta partiti, ho portato il gas a circa metà.
Poi ho dato tutto YAW a dx ....
poi rilasciato lo stick....
poi tutto YAW a sx....
poi ho rilasciato lo stick....
poi ho abbassato il gas e atteso che la FC spegnesse i motori.
In nero il comando dello YAW
C1 e C2 sono i motori CW
C3 e C4 sono i motori CCW
Finchè non tocco lo YAW, i motori sono comandati tutti e 4 in pari, il che significa che ora dovrebbe decollare SENZA roteare....Commenta
-
A memoria non ricordo esattamente ma nel log hai il la possibilità di verificare incrociando il roll desiderato (input da rx) vs roll compiuto effettivamente dalla macchina... Roll vs desroll. Idem per pitch e credo proprio yaw. Se le due curve non coincidono ci potrebbe essere un problema hardwareCommenta
Commenta