Ciao a tutti sono Fabio,
è un po' che leggo questo forum dal quale ho potuto apprendere tanti spunti e consigli utili per realizzare finalmente ciò che volevo fare da tempo: il mio primo quadricottero.
Premetto che sono completamente digiuno di modellismo in generale, specialmente nell'aeromodellismo, ma molto appassionato di elettronica ed informatica, quindi da semplice lettore ho voluto condividere con voi questa esperienza di autocostruzione e magari contribuire ad aiutare altre persone che, come me, trovano nei forum tante fonti di ispirazione per la costruzione e risoluzione di problemi.
YAQ è abbastanza semplice, nasce dallesigenza di realizzare una struttura economica, sufficientemente robusta e facile da riparare (devo pur imparare a pilotarlo!). Molte delle parti del frame sono di recupero, come ad esempio le piastre di vetronite, colonnine, conduttori, etc, tutto materiale proveniente dal classico "cassetto" di laboratorio.
Il resto lho acquistato dal ben noto rivenditore HK:
Motori: Turnigy L2215J 900Kv 200W (link)
Eliche: EPP 10x4.5 (link)
ESC: Tunigy Plush 25A (link)
Connettori: XT90 (link)
Tx-Rx: Turnigy TGY-9 v.2 (Immediatamente riflashata con firmware ER-9X) (link) (link)
Batteria radio 9x: Zippy LiFePo 1800mAh (link)
Controller: HK clone KK Blue Board (link)
Batteria: Turnigy 3300mAh 3S1P (link)
LiPoAlarm: (link)
Caricatore: Accucell 8150 (link)
Per il frame ho buttato giù un paio di disegni con Sketchup, le board superiore ed inferiore (rail corrente ESC, quote e forature) in 2D, ed una vista d'insieme in 3D per controllare ad occhio le proporzioni del risultato finale. All'inizio ero indeciso su quale configurazione utilizzare, + o x, ma alla fine considerando il montaggio di potenziali fotocamere per riprese e FPV alla fine ho optato per la x.


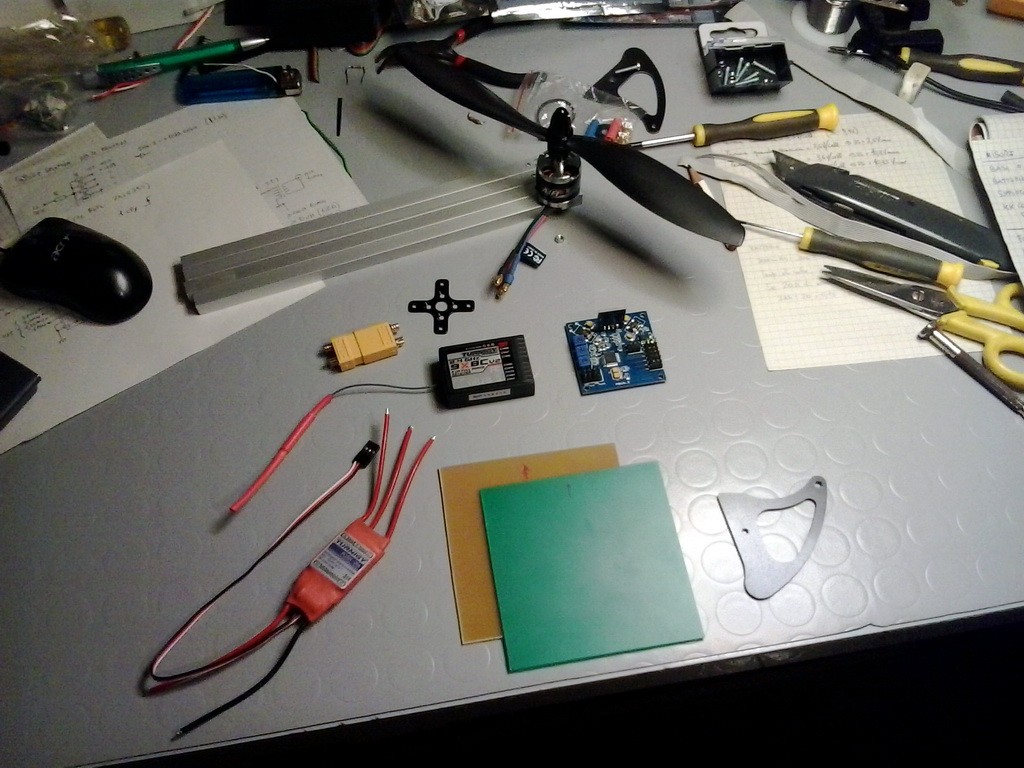
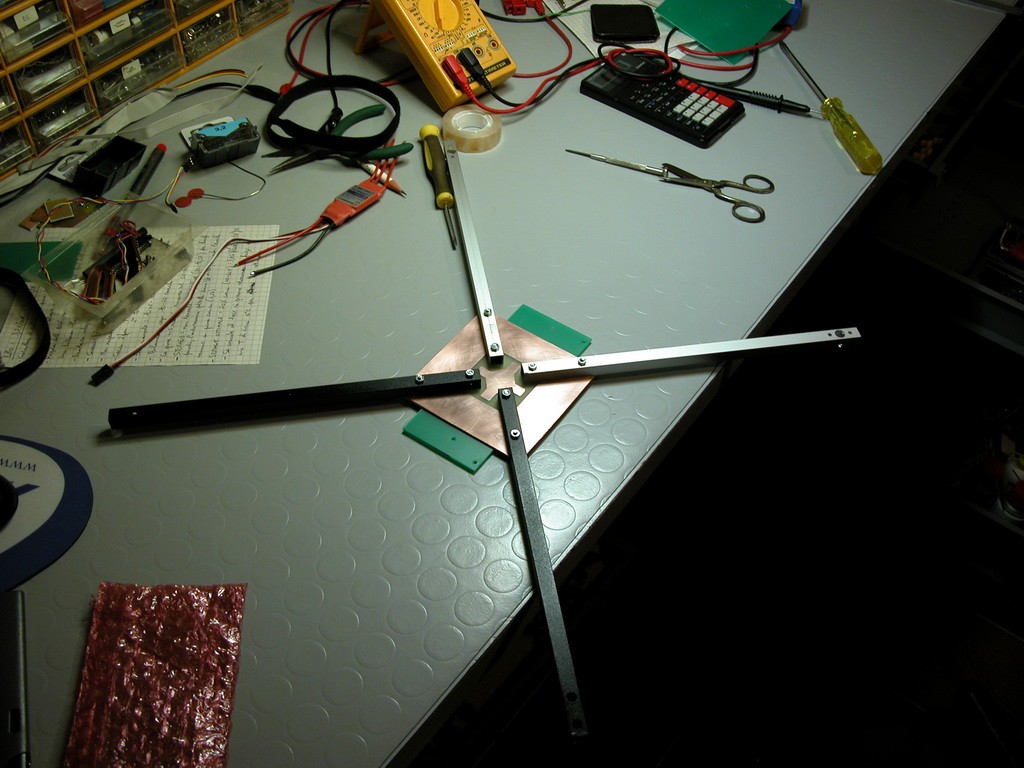
I quadrelli sono quelli classici in alluminio da 10x10mm che si trovano al Brico in lunghezze da un metro. Ne ho tagliato uno in quattro parti uguali per ottenere i singoli bracci da 250mm e forato per alloggiarci i motori. La distanza centrale fra un braccio e lopposto è di 30mm, per una diagonale massima di 530mm (un po' meno per via del montaggio dei motori):

Si cominciano a presentare le parti opportunamente sagomate:
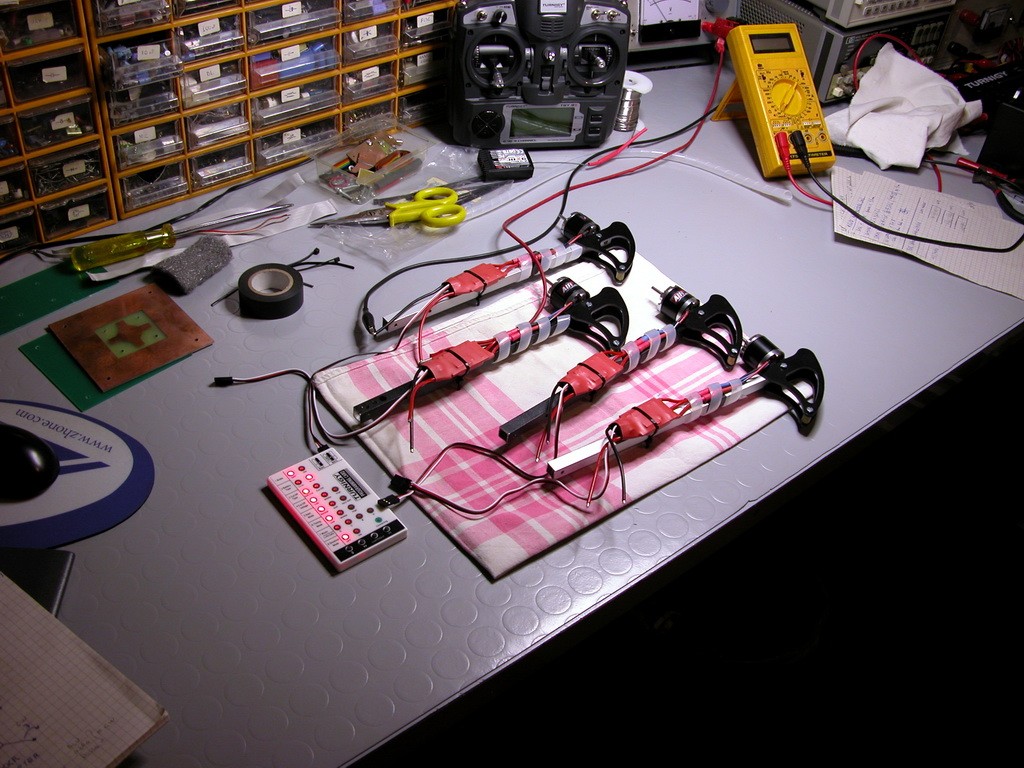
Preparo i bracci con i motori (già bilanciati con il nastro) ed il cablaggio degli ESC e poi li programmo tutti assieme con la comoda card:
Proseguo con la costruzione meccanica e cablaggio elettrico:
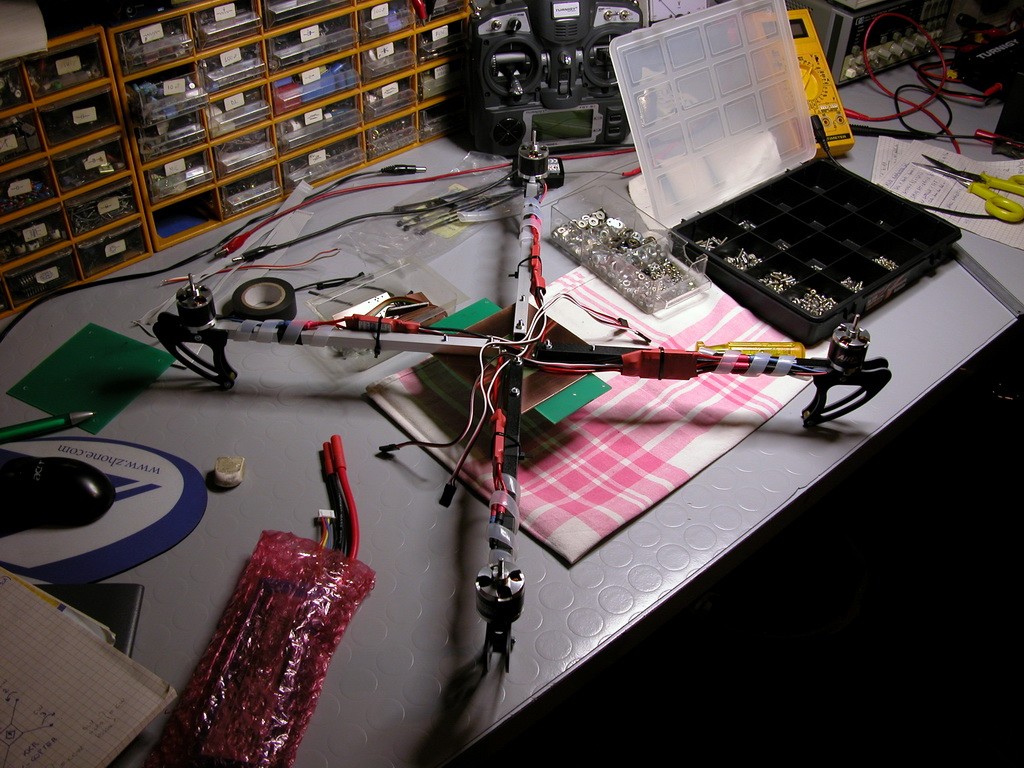

Batteria LiPo montata su sottopiastra inferiore di supporto e fissata con strisce di velcro:

Risultato finale con doppio piano per ricevitore ed antenna:

Il peso totale in ordine di volo è circa 1,1 Kg.
Caricato il firmware XX KR XCopter v2.9 di Minsoo Kim (link) (basato su quello di Mike Barton, a sua volta basato sul lavoro di Rolf Bakke), effettuato tutte le calibrazioni di rito (RangeTX, inversione comandi, ESC), verificato che i feedback degli accelerometri fossero correttamente orientati: sembra tutto ok, si può volare!
Primo pensiero: acciderbolina (non esattamente) quanto è difficile da pilotare! Ma come facevano in tutti i filmati visti su youtube a fare cose turche con la KK?? Misteri...
I primi tentativi di volo si sono rivelati dei miseri "zompetti" a meno di un metro di quota con consecutivi atterraggi non proprio "soffici"... All'ennesimo atterraggio stile "SBOONK" ho finalmente realizzato che prima di sfasciare tutto forse sarebbe stato meglio provare sul prato...
Bene, sul prato ho un po' meno timore ed oso salire in hovering qualche metro in più per allontanarmi dal fastidioso effetto suolo. Il quadricottero tuttavia non appare molto stabile, deriva e tendenzialmente è incline all'autorotazione.
Aumento un po' i guadagni degli accelerometri, trimmero un po' sulla radio, setto un buon 70% di esponenziale sui comandi tranne il throttle: già è molto meglio! Aumento ancora i guadagni fino al ben noto effetto oscillazione, quindi riduco un pochino così come spesso raccomandato. Ah la differenza di usare la scheda HK clone con il firmware di Minsoo Kim comporta che i versi di rotazione dei trimmer sono invertiti: quando in teoria sarebbero al massimo, in realtà il controllo è al minimo e viceversa (tra l'altro è il motivo del perché non riuscivo a farla entrare in modo calibrazione).
Queste board equipaggiate con soli giroscopi sono molto semplici. A giudicare dalla frequenza dell'oscillazione da sovracompensazione presumo che le regolazioni dei guadagni sui tre assi siano fondamentalmente equivalenti al classico Kp (proporzionale) delle schede più evolute con controllo PID, mentre il Ki (integrale) probabilmente è hardware coded. Magari qualcuno che conosce meglio di me il firmware delle KK potrà essere più preciso. Ammetto di non aver studiato a fondo il codice sorgente di Kapitan Kuk dato che il richiamo del volo, associato al funzionamento di tutto al primo colpo, hanno avuto la meglio...
Insomma in questi giorni ho scaricato più volte la povera LiPo, che oltretutto avrà preso anche qualche contraccolpo di troppo. La durata media si attesta su circa 18-20 minuti di strapazzamenti vari, prima che il pigolio dell'undervoltage alarm cominci a farsi sentire sempre più insistentemente.
Ad oggi in pochi giorni sono riuscito a rompere solo un'elica e raggiungere un modesto controllo del velivolo, lo ritengo già un successo per un'autodidatta come me che non ha mai preso un radiocomando in mano!
La board KK la utilizzo giusto per imparare a volare dato che con essa è possibile solo il modo acrobatico, ma non ho resistito, è già in viaggio (sempre che arrivi dato il periodo) la Crius AIOP + GPS Neo-6 che si basa sulla nota piattaforma Arduino Mega che conosco bene, con integrata un'IMU in I2C di ottimo livello.
Sono rimasto folgorato dalle notevoli possibilità del software ArduCopter e quindi del suo porting MegaPirateNG, non vedo l'ora di smanettare con quel controller!
Per ora saluto tutti ed in particolare il mitico TermicOne, che lui ancora non lo sa ma con i suoi build log mi ha aiutato parecchio!
è un po' che leggo questo forum dal quale ho potuto apprendere tanti spunti e consigli utili per realizzare finalmente ciò che volevo fare da tempo: il mio primo quadricottero.
Premetto che sono completamente digiuno di modellismo in generale, specialmente nell'aeromodellismo, ma molto appassionato di elettronica ed informatica, quindi da semplice lettore ho voluto condividere con voi questa esperienza di autocostruzione e magari contribuire ad aiutare altre persone che, come me, trovano nei forum tante fonti di ispirazione per la costruzione e risoluzione di problemi.
YAQ è abbastanza semplice, nasce dallesigenza di realizzare una struttura economica, sufficientemente robusta e facile da riparare (devo pur imparare a pilotarlo!). Molte delle parti del frame sono di recupero, come ad esempio le piastre di vetronite, colonnine, conduttori, etc, tutto materiale proveniente dal classico "cassetto" di laboratorio.
Il resto lho acquistato dal ben noto rivenditore HK:
Motori: Turnigy L2215J 900Kv 200W (link)
Eliche: EPP 10x4.5 (link)
ESC: Tunigy Plush 25A (link)
Connettori: XT90 (link)
Tx-Rx: Turnigy TGY-9 v.2 (Immediatamente riflashata con firmware ER-9X) (link) (link)
Batteria radio 9x: Zippy LiFePo 1800mAh (link)
Controller: HK clone KK Blue Board (link)
Batteria: Turnigy 3300mAh 3S1P (link)
LiPoAlarm: (link)
Caricatore: Accucell 8150 (link)
Per il frame ho buttato giù un paio di disegni con Sketchup, le board superiore ed inferiore (rail corrente ESC, quote e forature) in 2D, ed una vista d'insieme in 3D per controllare ad occhio le proporzioni del risultato finale. All'inizio ero indeciso su quale configurazione utilizzare, + o x, ma alla fine considerando il montaggio di potenziali fotocamere per riprese e FPV alla fine ho optato per la x.
I quadrelli sono quelli classici in alluminio da 10x10mm che si trovano al Brico in lunghezze da un metro. Ne ho tagliato uno in quattro parti uguali per ottenere i singoli bracci da 250mm e forato per alloggiarci i motori. La distanza centrale fra un braccio e lopposto è di 30mm, per una diagonale massima di 530mm (un po' meno per via del montaggio dei motori):
Si cominciano a presentare le parti opportunamente sagomate:
Preparo i bracci con i motori (già bilanciati con il nastro) ed il cablaggio degli ESC e poi li programmo tutti assieme con la comoda card:
Proseguo con la costruzione meccanica e cablaggio elettrico:
Batteria LiPo montata su sottopiastra inferiore di supporto e fissata con strisce di velcro:
Risultato finale con doppio piano per ricevitore ed antenna:
Il peso totale in ordine di volo è circa 1,1 Kg.
Caricato il firmware XX KR XCopter v2.9 di Minsoo Kim (link) (basato su quello di Mike Barton, a sua volta basato sul lavoro di Rolf Bakke), effettuato tutte le calibrazioni di rito (RangeTX, inversione comandi, ESC), verificato che i feedback degli accelerometri fossero correttamente orientati: sembra tutto ok, si può volare!
Primo pensiero: acciderbolina (non esattamente) quanto è difficile da pilotare! Ma come facevano in tutti i filmati visti su youtube a fare cose turche con la KK?? Misteri...
I primi tentativi di volo si sono rivelati dei miseri "zompetti" a meno di un metro di quota con consecutivi atterraggi non proprio "soffici"... All'ennesimo atterraggio stile "SBOONK" ho finalmente realizzato che prima di sfasciare tutto forse sarebbe stato meglio provare sul prato...
Bene, sul prato ho un po' meno timore ed oso salire in hovering qualche metro in più per allontanarmi dal fastidioso effetto suolo. Il quadricottero tuttavia non appare molto stabile, deriva e tendenzialmente è incline all'autorotazione.
Aumento un po' i guadagni degli accelerometri, trimmero un po' sulla radio, setto un buon 70% di esponenziale sui comandi tranne il throttle: già è molto meglio! Aumento ancora i guadagni fino al ben noto effetto oscillazione, quindi riduco un pochino così come spesso raccomandato. Ah la differenza di usare la scheda HK clone con il firmware di Minsoo Kim comporta che i versi di rotazione dei trimmer sono invertiti: quando in teoria sarebbero al massimo, in realtà il controllo è al minimo e viceversa (tra l'altro è il motivo del perché non riuscivo a farla entrare in modo calibrazione).
Queste board equipaggiate con soli giroscopi sono molto semplici. A giudicare dalla frequenza dell'oscillazione da sovracompensazione presumo che le regolazioni dei guadagni sui tre assi siano fondamentalmente equivalenti al classico Kp (proporzionale) delle schede più evolute con controllo PID, mentre il Ki (integrale) probabilmente è hardware coded. Magari qualcuno che conosce meglio di me il firmware delle KK potrà essere più preciso. Ammetto di non aver studiato a fondo il codice sorgente di Kapitan Kuk dato che il richiamo del volo, associato al funzionamento di tutto al primo colpo, hanno avuto la meglio...
Insomma in questi giorni ho scaricato più volte la povera LiPo, che oltretutto avrà preso anche qualche contraccolpo di troppo. La durata media si attesta su circa 18-20 minuti di strapazzamenti vari, prima che il pigolio dell'undervoltage alarm cominci a farsi sentire sempre più insistentemente.
Ad oggi in pochi giorni sono riuscito a rompere solo un'elica e raggiungere un modesto controllo del velivolo, lo ritengo già un successo per un'autodidatta come me che non ha mai preso un radiocomando in mano!
La board KK la utilizzo giusto per imparare a volare dato che con essa è possibile solo il modo acrobatico, ma non ho resistito, è già in viaggio (sempre che arrivi dato il periodo) la Crius AIOP + GPS Neo-6 che si basa sulla nota piattaforma Arduino Mega che conosco bene, con integrata un'IMU in I2C di ottimo livello.
Sono rimasto folgorato dalle notevoli possibilità del software ArduCopter e quindi del suo porting MegaPirateNG, non vedo l'ora di smanettare con quel controller!
Per ora saluto tutti ed in particolare il mitico TermicOne, che lui ancora non lo sa ma con i suoi build log mi ha aiutato parecchio!


") ).
).



Commenta